Gaussian Processes Models
Outline
- Introduction Gaussian Processes
- Gaussian Processes for Spatial Autocorrelation
- Introduction Gaussian Processes for Timeseries
Previously we have encountered Timeseries
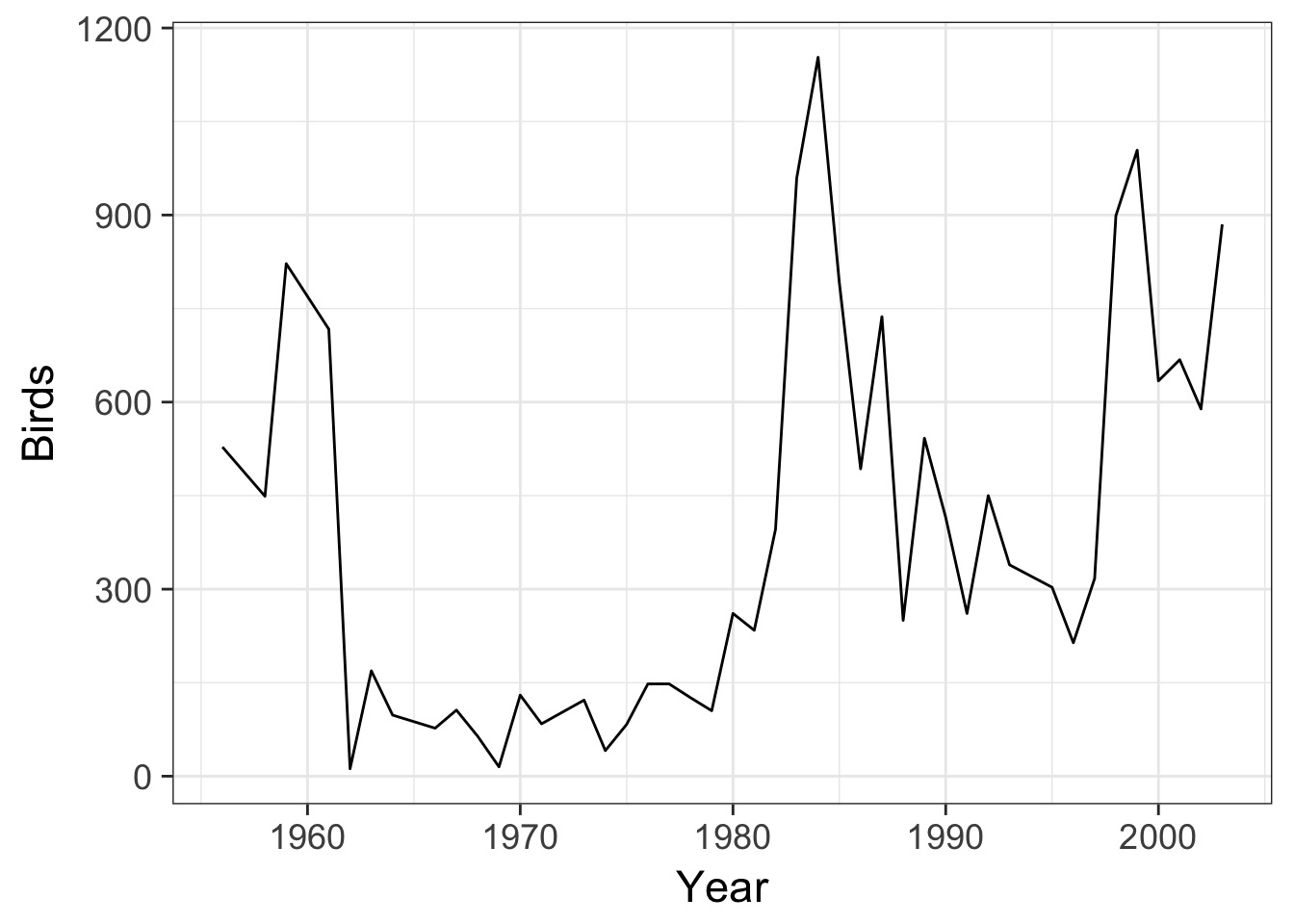
Correlation in Residuals
library(nlme)
birds_lm <- gls(Birds ~ Year, data=oahu_data)
acf(residuals(birds_lm))
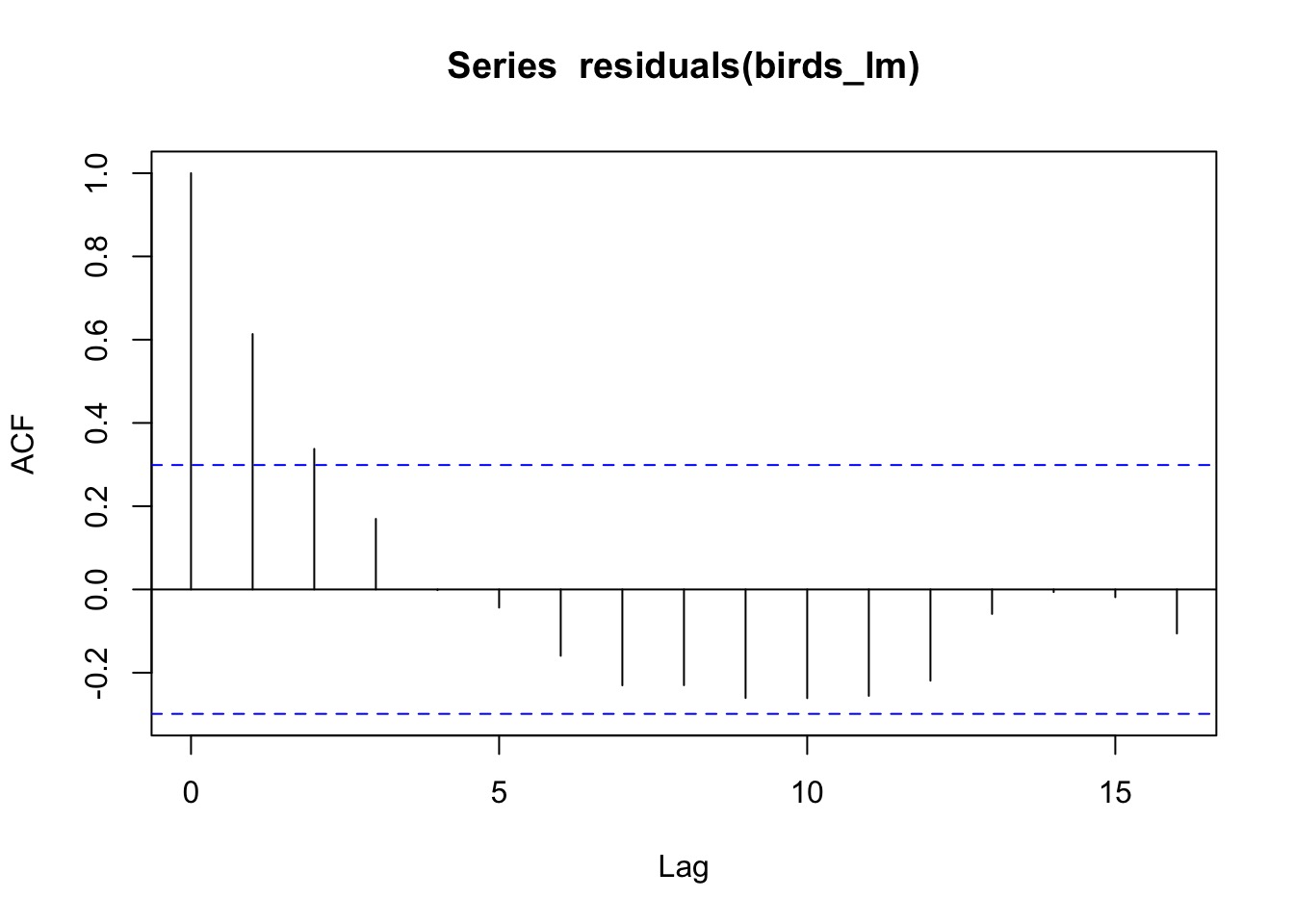
Many ways of modeling autocorrelation
\[ \epsilon_{t} = \rho \epsilon_{t-1} + \zeta_{t}\]
which produces
\[ cor(\epsilon) = \begin{pmatrix}
1 & \rho &\rho^{2} \\
\rho & 1& \rho\\
\rho^{2} & \rho & 1
\end{pmatrix}\]
for n=3 time steps
Many ways of modeling autocorrelation
- Lagged models (\(y_t = \beta y_{t-1}\))
- AR1 or AR2 correlation
- ARMA (autoregressive moving average)
- ARIMA
- ARCH (SD varies over time, but not mean)
- GARCH (SD and mean vary over time)
- Continuous error structure for gaps (CAR1, CAR2)
Continuous error useful for spatial autocorrelation
Spatial Autocorrelation in Residuals
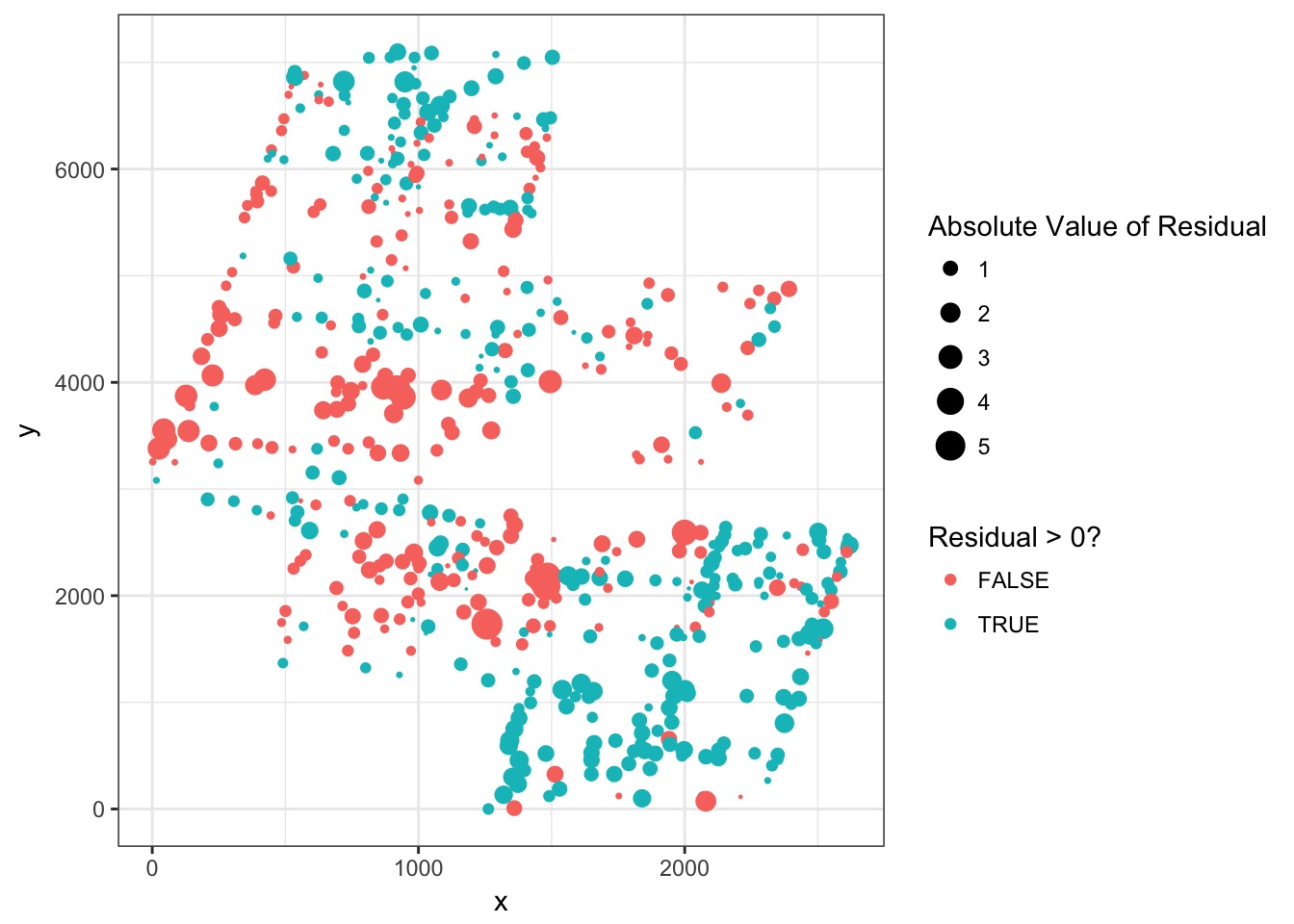
Spatial Autocorrelation Variograms!
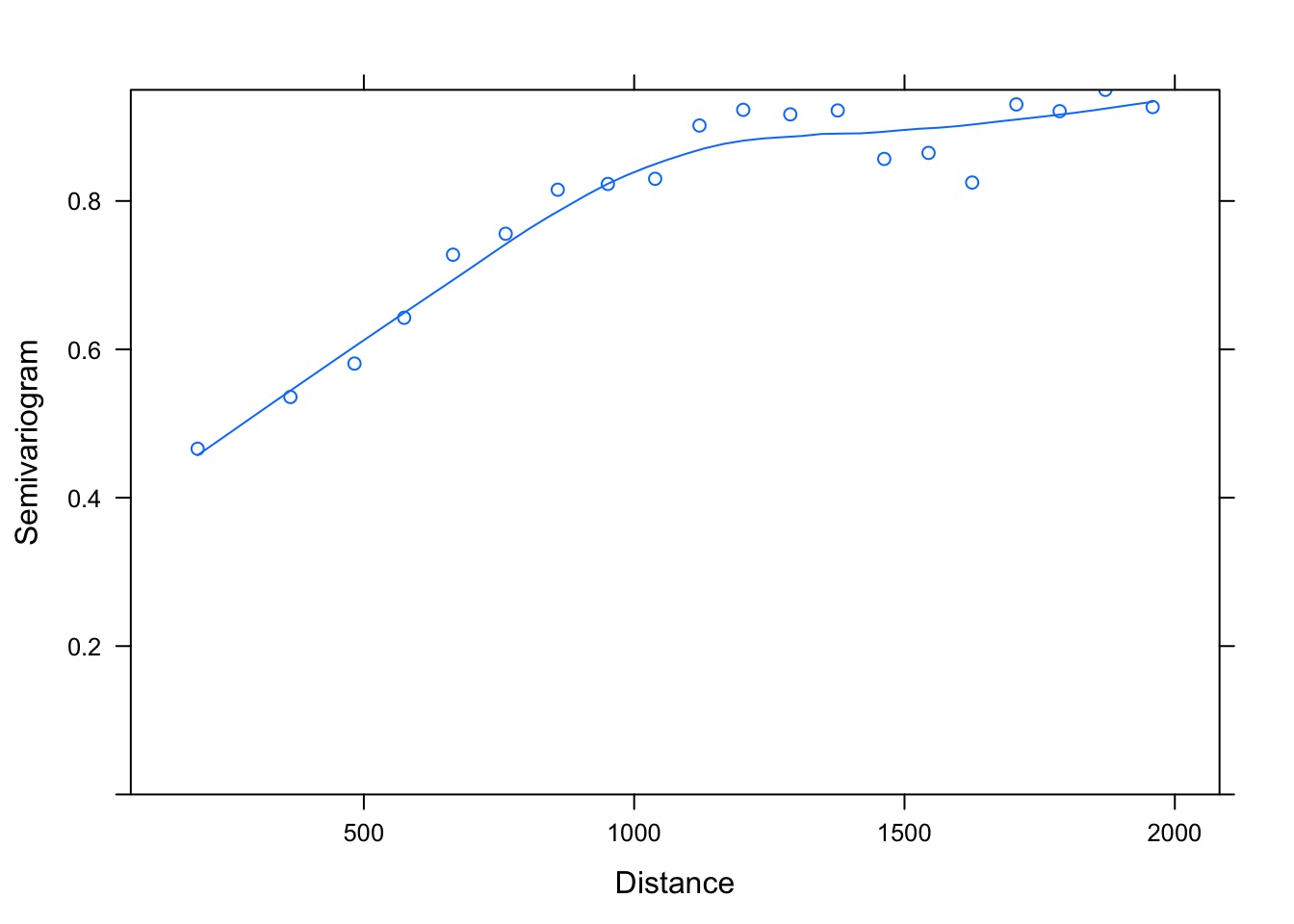
What shape defines autocorrelation?
Consider: \[ K_{ij} = \begin{pmatrix}
\sigma_1^2 & \sigma_1\sigma_2 &\sigma_1\sigma_3 \\
\sigma_1\sigma_2 & \sigma_2^2& \sigma_2\sigma_3\\
\sigma_1\sigma_3 & \sigma_2\sigma_3 & \sigma_3^2
\end{pmatrix}\]
What is the function that defines \(\sigma_i\sigma_j\) based on the distance between i and j?
Different Shapes of Autocorrelation
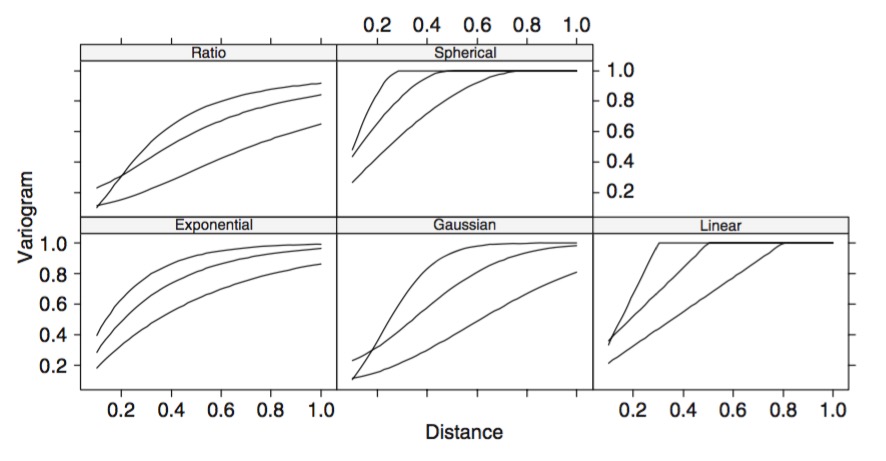
This works for continuous temporal autocorrelation as well!
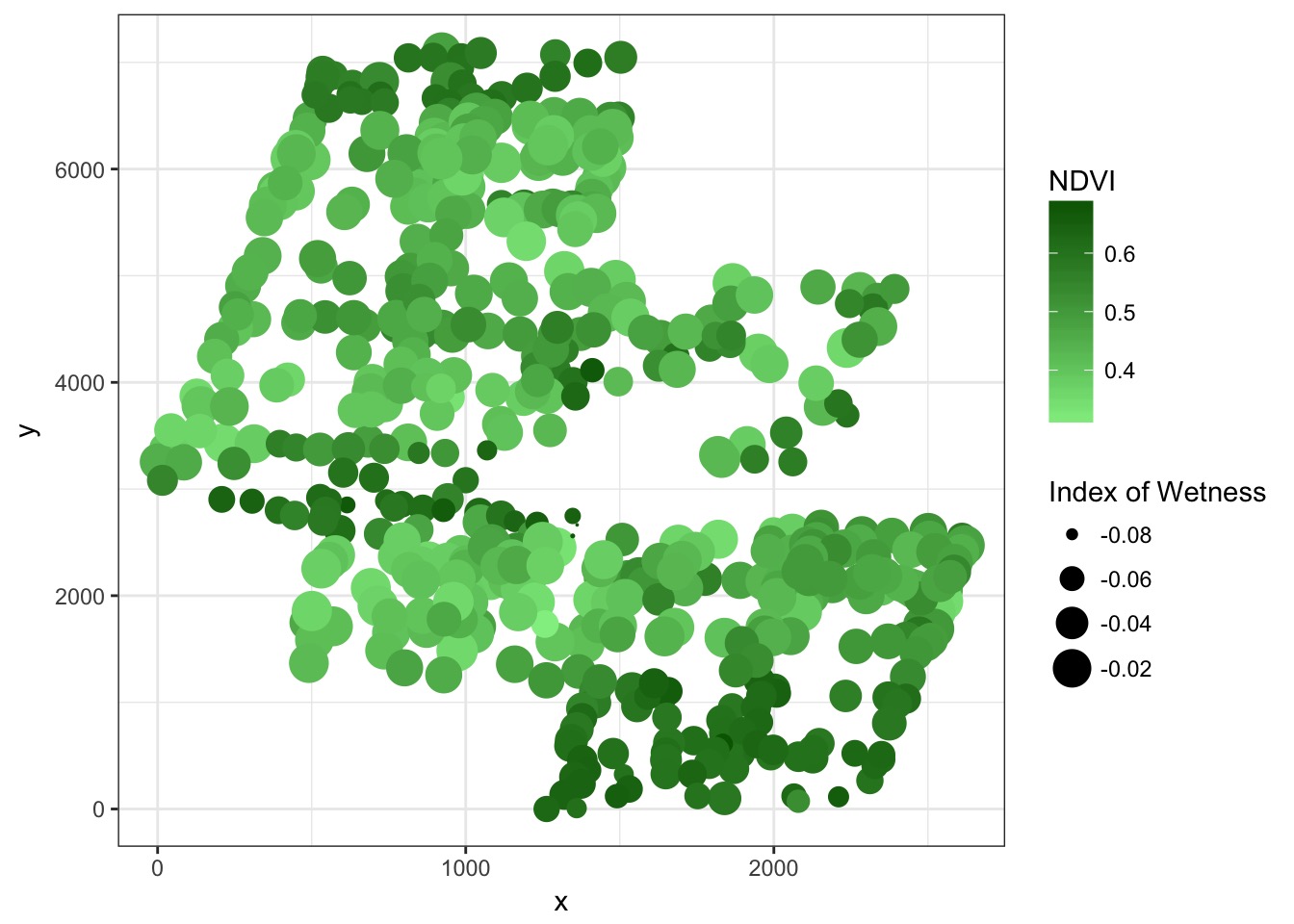
Linking Multilevel Models and Correlation: Consider sampling for greeness
Random Intercept model for greeness
Likelihood
\(Green_i \sim Normal(\mu_{green}, \sigma_{green})\)
Data Generating Process
\(\mu_{green} = \overline{a} + a_{patch}\)
\(a_{patch} \sim dnorm(0, \sigma_{patch})\)
But “patch” isn’t discrete - it’s continuous, and we know how close they are to each other!
Introducing Gaussian Processes
A GP is a random process creating a multivariate normal distribution between points where the covariance between points is related to their distance.
\[a_{patch} \sim MVNorm(0, K)\]
\[K_{ij} = F(D_{ij})\]
where \(D_{ij} = x_i - x_j\)
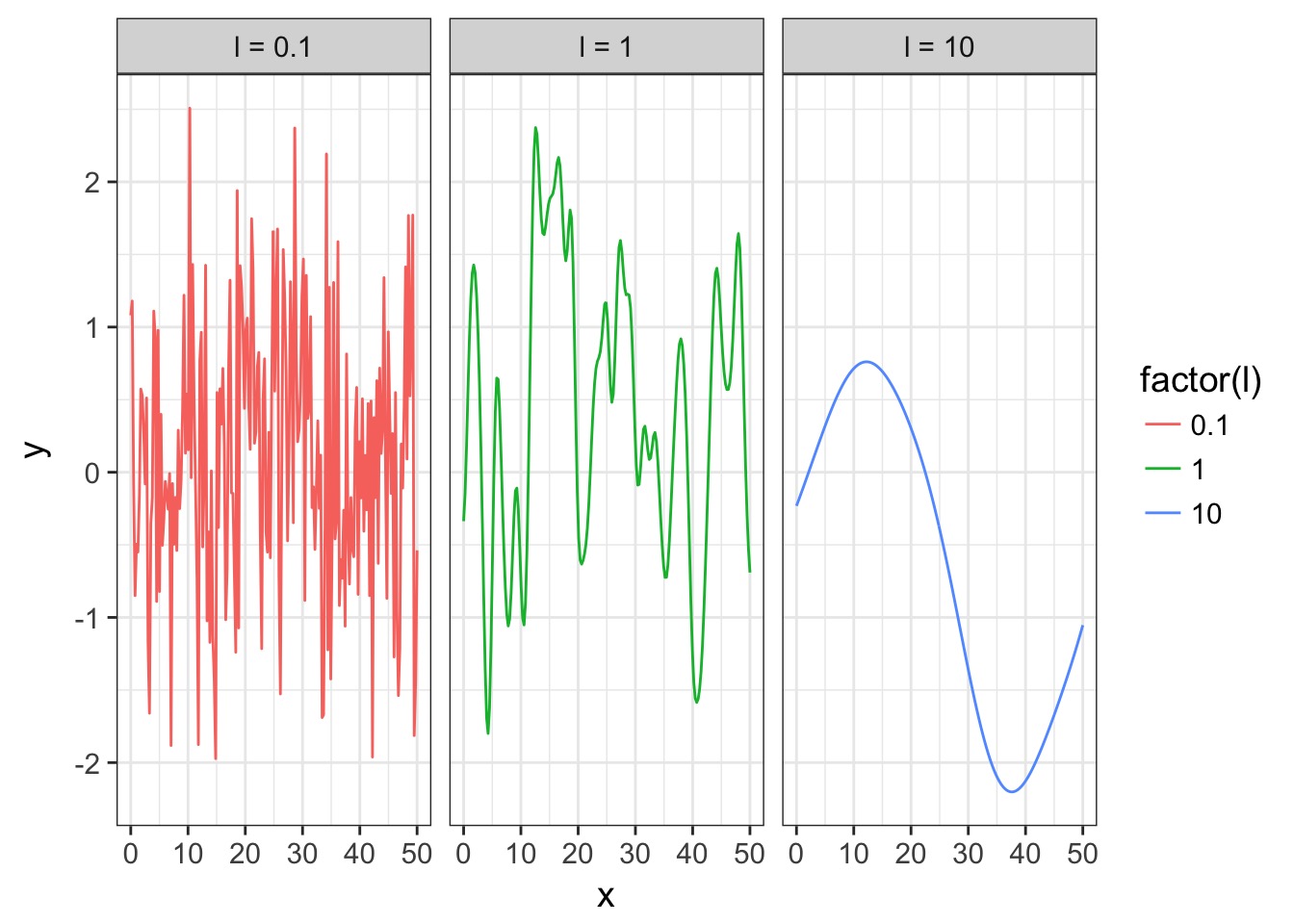
The Squared Exponential Function(kernel)
\[K_{ij} = \eta^2 exp \left( -\frac{D_{ij}^2}{2 \mathcal{l}^2} \right)\]
where \(\eta^2\) provides the scale of the function and \(\mathcal{l}\) the timescale of the process
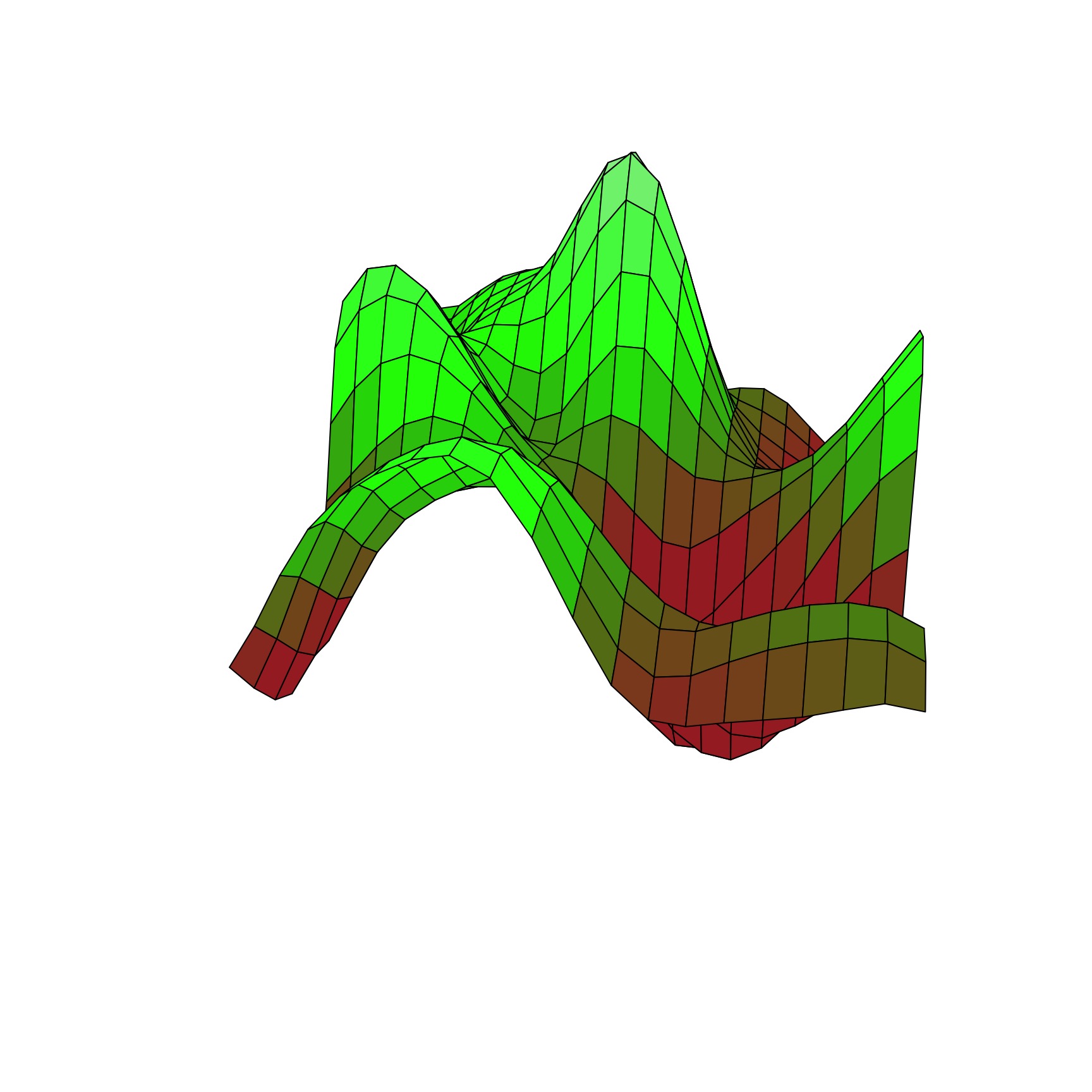
The Squared Exponential Covariance Function (kernel)
A surface from a Squared Exponential GP
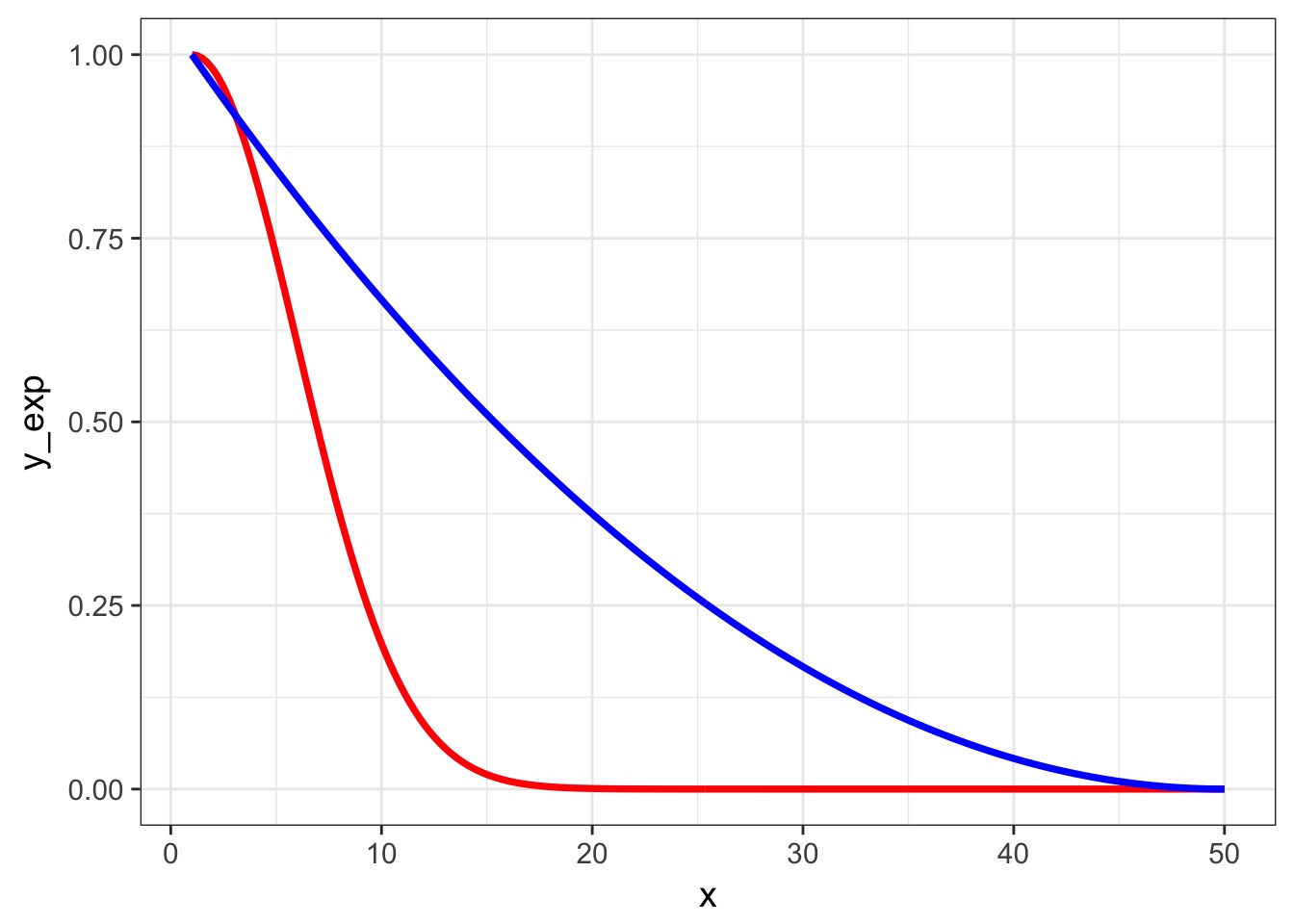
Squared Exponential v. Squared AR1 Dropoff
Other Covariance Functions
- Periodic: \(K_{P}(i,j) = \exp\left(-\frac{ 2\sin^2\left(\frac{D_{ij}}{2} \right)}{\mathcal{l}^2} \right)\)
- Ornstein–Uhlenbeck: \(K_{OI}(i,j) = \eta^2 exp \left( -\frac{|D_{ij}|}{\mathcal{l}} \right)\)
- Quadratic \(K_{RQ}(i,j)=(1+|d|^{2})^{-\alpha },\quad \alpha \geq 0\)
The Squared Exponential Function in rethinking (with GLP2)
\[K_{ij} = \eta^2 exp \left( -\frac{D_{ij}^2}{2 \mathcal{l}^2} \right)\]
rethinking:
\[K_{ij} = \eta^2 exp \left( -\rho^2 D_{ij}^2 \right) + \delta_{ij}\sigma^2\]
\(\rho^2 = \frac{1}{2 \mathcal{l}^2}\)
\(\delta_{ij}\) introduces stochasticity, and we set importance with \(\sigma^2\)
Operationalizing a GP
Let’s assume a Squared Exponential GP with an \(\eta^2\) and \(\mathcal{l}\) of 1. Many possible curves: 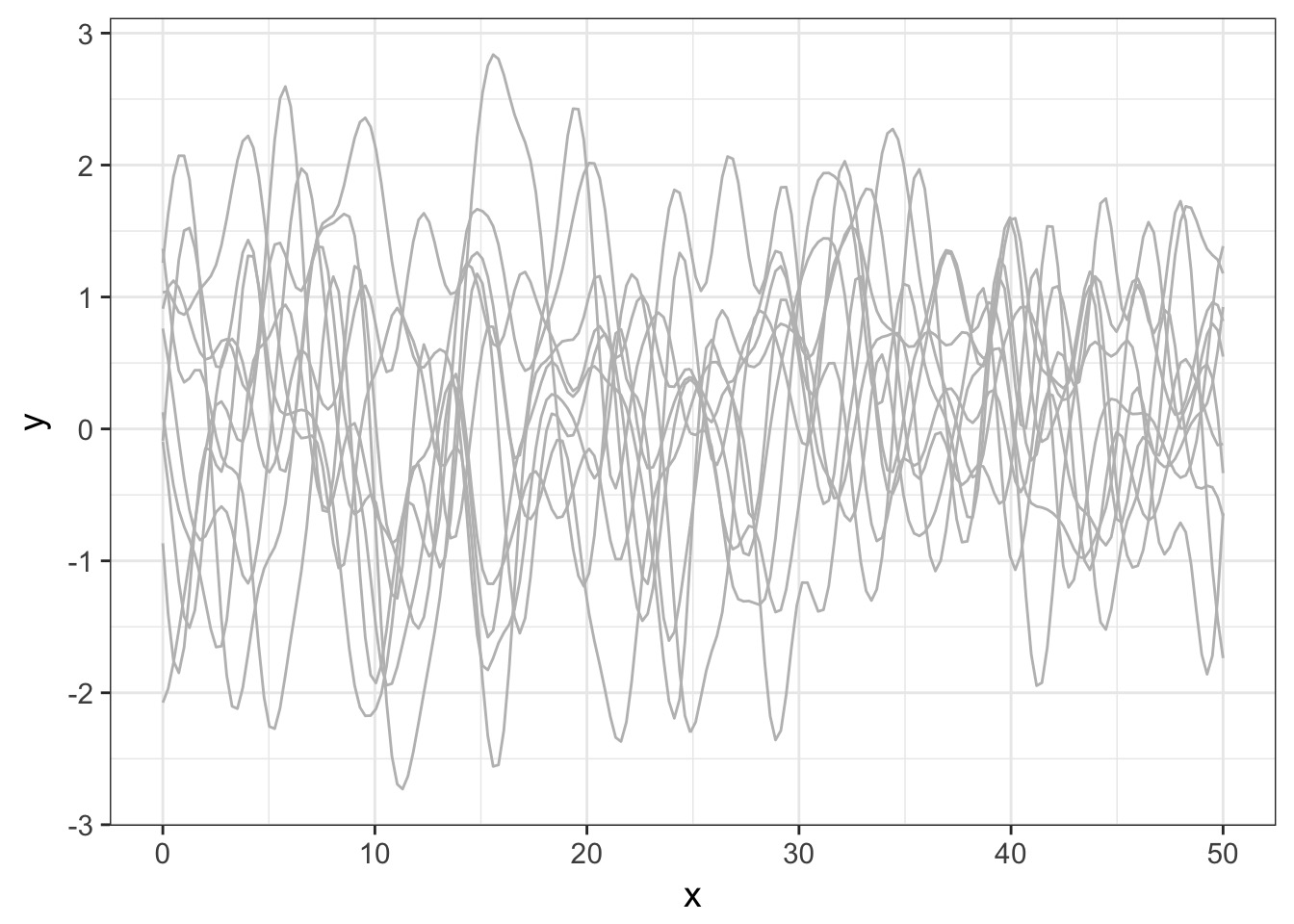
Operationalizing a GP
And actually, on average 
But once we add some data…
Pinching in around observations! 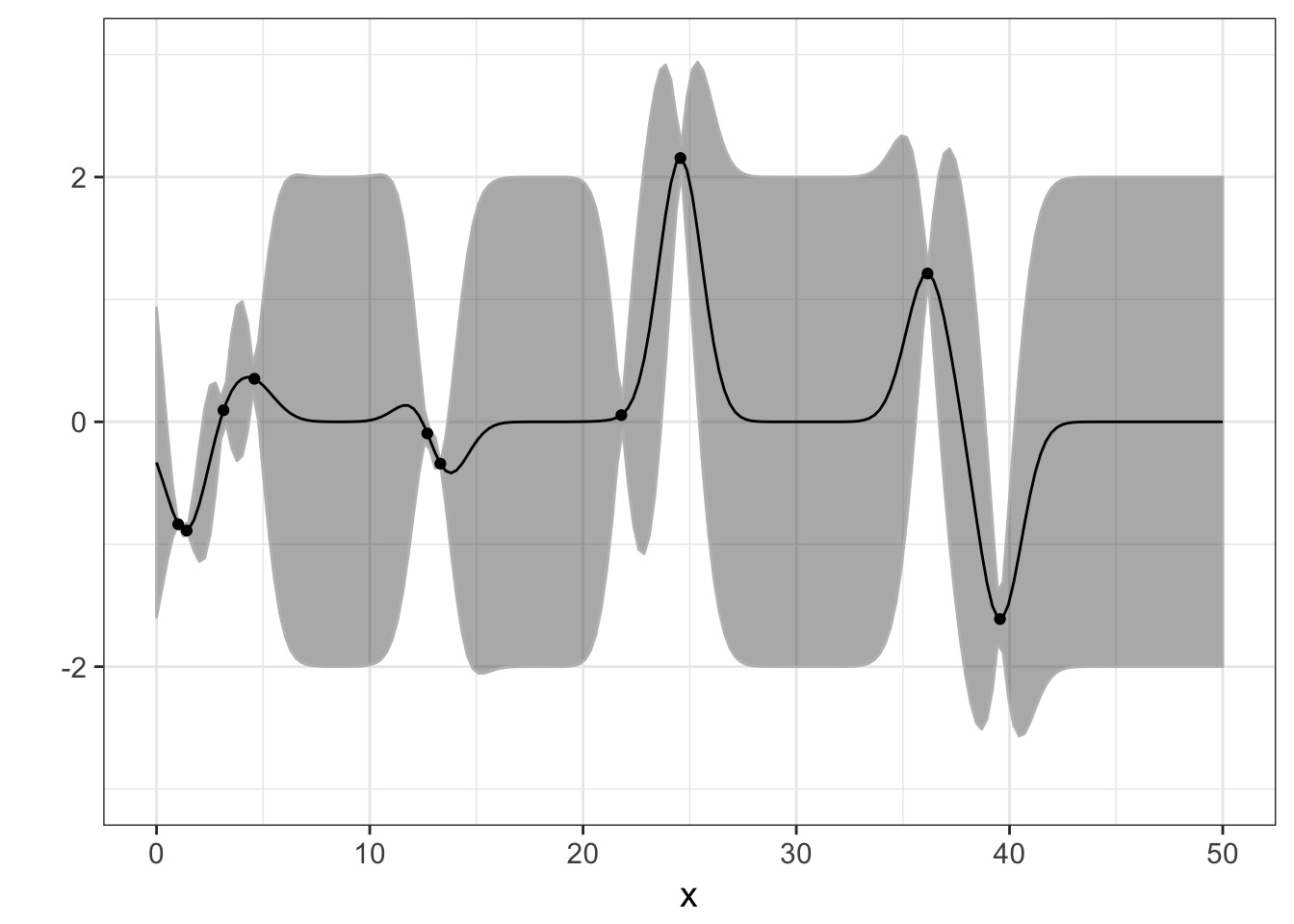
Warnings!
- Not mechanistic!
- But can incorporate many sources of variability
- e.g., recent analysis showing multiple GP underlying Zika for forecasting
- Can mix mechanism and GP
Outline
- Introduction Gaussian Processes
- Gaussian Processes for Spatial Autocorrelation
- Introduction Gaussian Processes for Timeseries
Distances between islands
data(islandsDistMatrix)
islandsDistMatrix
Malekula Tikopia Santa Cruz Yap Lau Fiji Trobriand Chuuk
Malekula 0.000 0.475 0.631 4.363 1.234 2.036 3.178
Tikopia 0.475 0.000 0.315 4.173 1.236 2.007 2.877
Santa Cruz 0.631 0.315 0.000 3.859 1.550 1.708 2.588
Yap 4.363 4.173 3.859 0.000 5.391 2.462 1.555
Lau Fiji 1.234 1.236 1.550 5.391 0.000 3.219 4.027
Trobriand 2.036 2.007 1.708 2.462 3.219 0.000 1.801
Chuuk 3.178 2.877 2.588 1.555 4.027 1.801 0.000
Manus 2.794 2.670 2.356 1.616 3.906 0.850 1.213
Tonga 1.860 1.965 2.279 6.136 0.763 3.893 4.789
Hawaii 5.678 5.283 5.401 7.178 4.884 6.653 5.787
Manus Tonga Hawaii
Malekula 2.794 1.860 5.678
Tikopia 2.670 1.965 5.283
Santa Cruz 2.356 2.279 5.401
Yap 1.616 6.136 7.178
Lau Fiji 3.906 0.763 4.884
Trobriand 0.850 3.893 6.653
Chuuk 1.213 4.789 5.787
Manus 0.000 4.622 6.722
Tonga 4.622 0.000 5.037
Hawaii 6.722 5.037 0.000
What if I needed to make a distance matrix?
dist(cbind(Kline2$lat, Kline2$lon))
1 2 3 4 5 6
2 4.205948
3 5.797413 3.224903
4 39.115214 37.652756 34.444884
5 10.692053 10.754069 13.978913 48.371893
6 18.257053 18.258423 15.231874 22.250393 28.650305
7 28.539446 26.152055 23.129418 13.662357 36.500137 16.115210
8 25.019992 24.158849 20.946837 14.560220 34.882660 7.717513
9 342.735029 344.115112 341.361524 314.800540 353.317336 326.339486
10 325.121593 325.994172 323.052503 293.884076 335.811629 307.831464
7 8 9
2
3
4
5
6
7
8 10.599057
9 328.049082 322.665802
10 307.454208 303.298945 45.534273
Well, convert lat/lon to UTM first, and to matrix after dist
Our GP Model
Likelihood
\(Tools_i \sim Poisson(\lambda_i)\)
Data Generating Process \(log(\lambda_i) = \alpha + \gamma_{society} + \beta log(Population_i)\)
\(\gamma_{society} \sim MVNormal((0, ....,0), K)\)
\(K_{ij} = \eta^2 exp \left( -\rho^2 D_{ij}^2 \right) + \delta_{ij}(0.01)\)
Priors
\(\alpha \sim Normal(0,10)\)
\(\beta \sim Normal(0,1)\)
\(\eta^2 \sim HalfCauchy(0,1)\)
\(\rho^2 \sim HalfCauchy(0,1)\)
Our model
Kline2$society <- 1:nrow(Kline2)
k2mod <- alist(
#likelihood
total_tools ~ dpois(lambda),
#Data Generating Process
log(lambda) <- a + g[society] + bp*logpop,
g[society] ~ GPL2( Dmat , etasq , rhosq , 0.01 ),
#Priors
a ~ dnorm(0,10),
bp ~ dnorm(0,1),
etasq ~ dcauchy(0,1),
rhosq ~ dcauchy(0,1)
)
GPL2
g[society] ~ GPL2( Dmat , etasq , rhosq , 0.01)
- Note that we supply a distance matrix
- GPL2 explicitly creates the MV Normal density, but only requires parameters
Fitting - a list shall lead them
- We have data of various classes (e.g. matrix, vectors)
- Hence, we use a list
- This can be generalized to many cases, e.g. true multilevel models
k2fit <- map2stan(k2mod,
data = list(
total_tools = Kline2$total_tools,
logpop = Kline2$logpop,
society = Kline2$society,
Dmat = islandsDistMatrix),
warmup=2000 , iter=1e4 , chains=3)
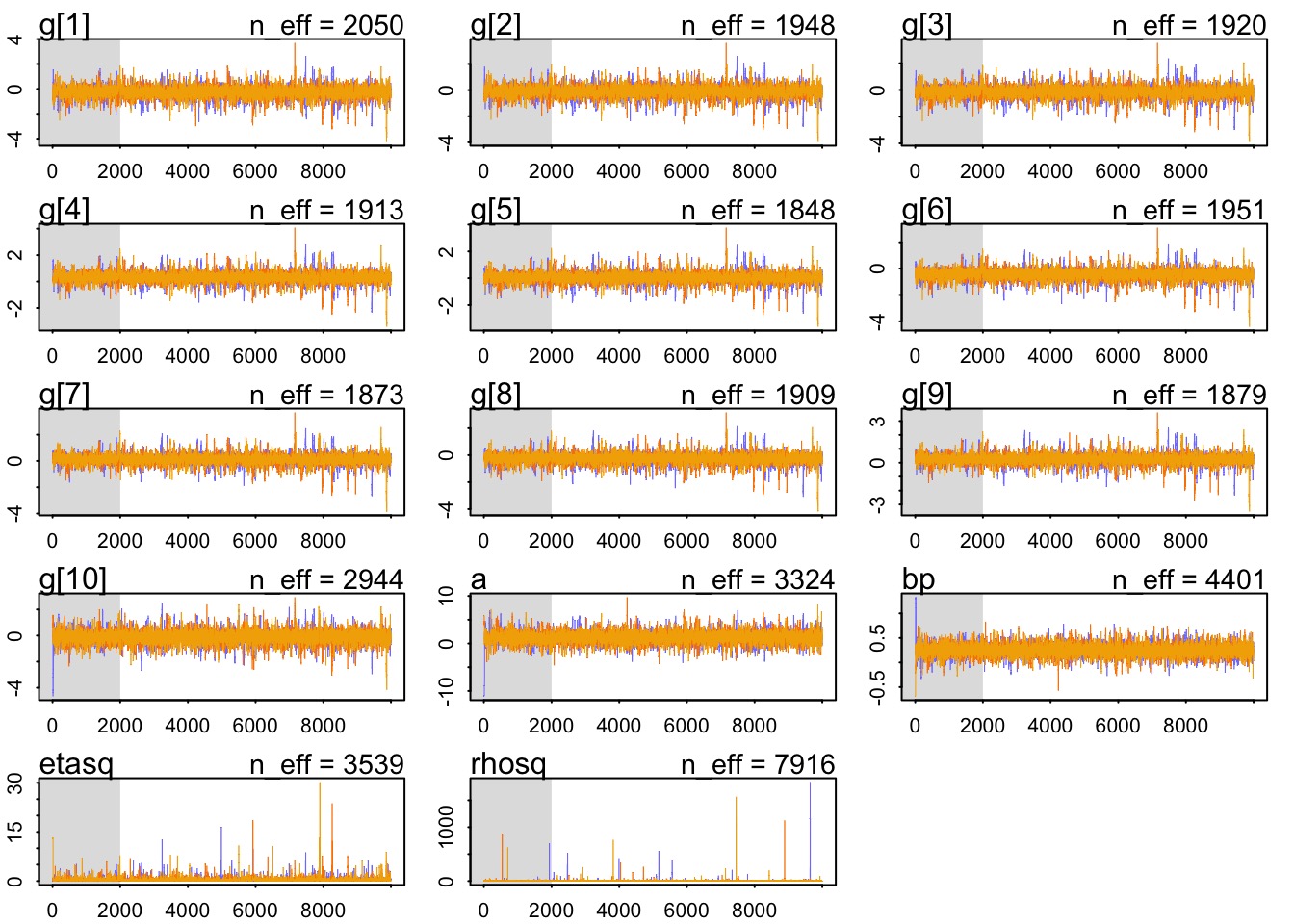
Did it converge?
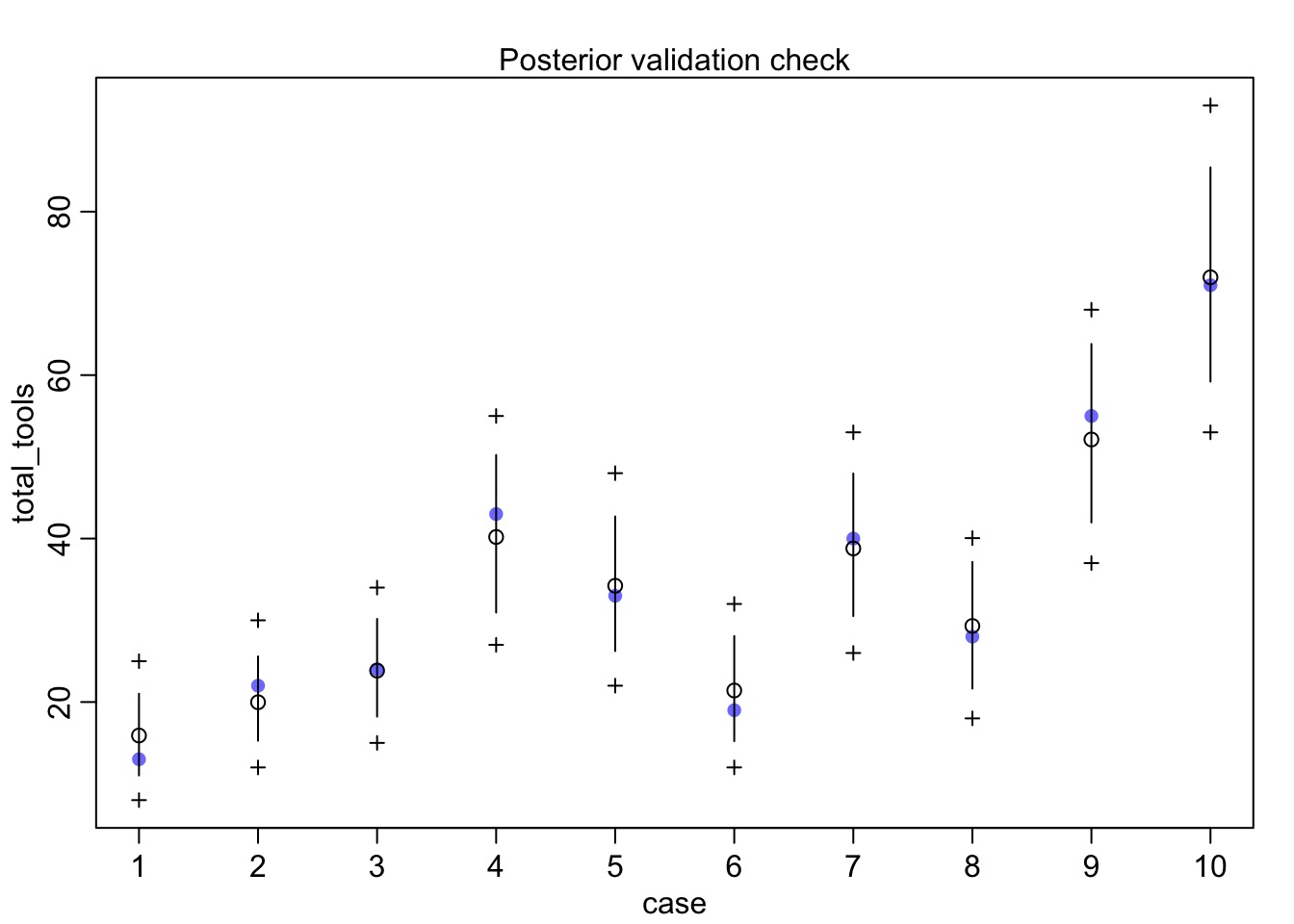
Did it fit?
What does it all mean?
Mean StdDev lower 0.89 upper 0.89 n_eff Rhat
a 1.26 1.19 -0.56 3.13 3324 1
bp 0.25 0.12 0.07 0.43 4401 1
etasq 0.37 0.63 0.00 0.75 3539 1
rhosq 1.94 24.43 0.01 2.07 7916 1
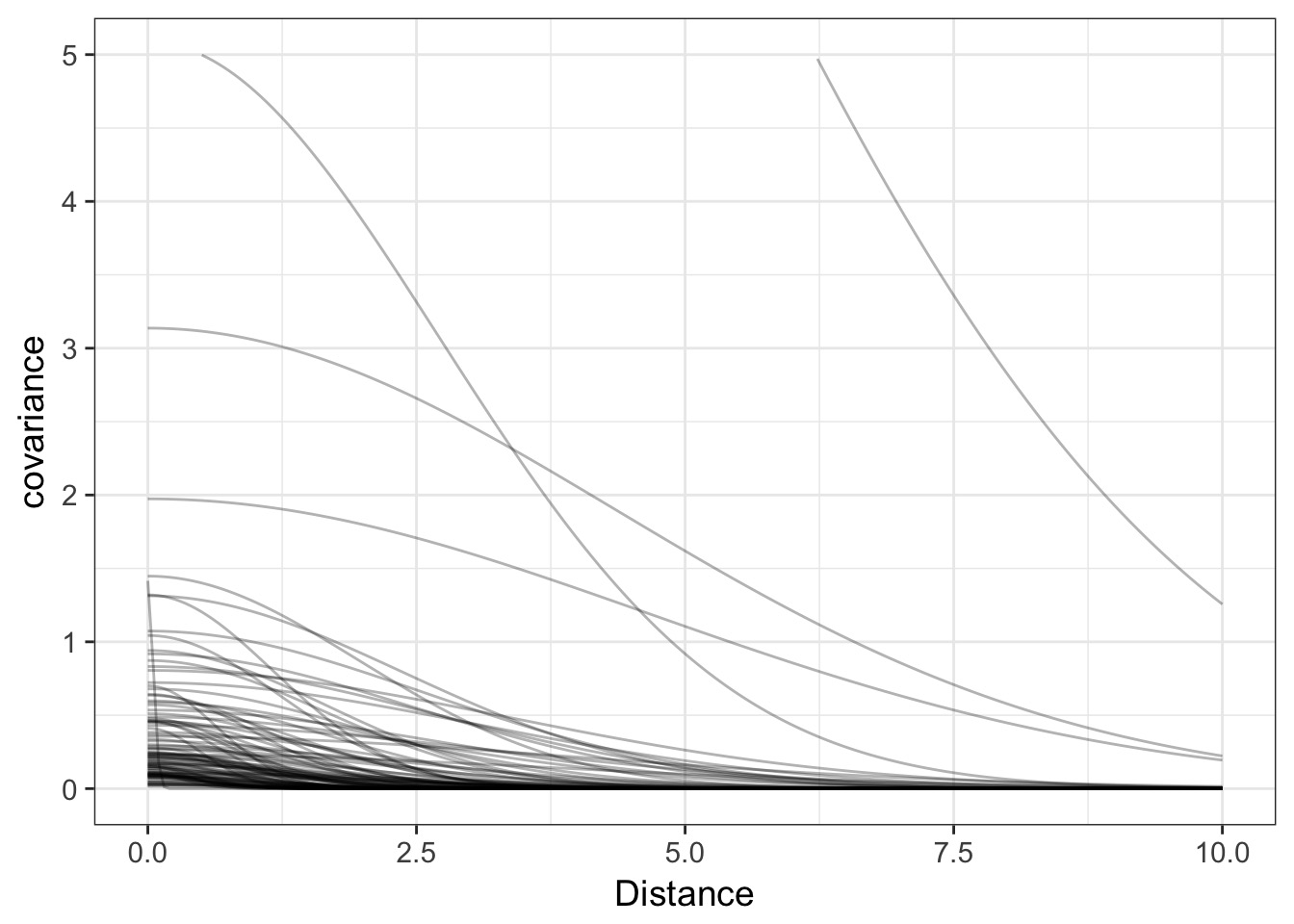
What is our covariance function by distance?
#get samples
k2_samp <- extract.samples(k2fit)
#covariance function
cov_fun_rethink <- function(d, etasq, rhosq){
etasq * exp( -rhosq * d^2)
}
#make curves
decline_df <- crossing(data.frame(x = seq(0,10,length.out=200)),
data.frame(etasq = k2_samp$etasq[1:100],
rhosq = k2_samp$rhosq[1:100])) %>%
dplyr::mutate(covariance = cov_fun_rethink(x, etasq, rhosq))
Covariance by distance
Correlation Matrix
cov_mat <- cov_fun_rethink(islandsDistMatrix,
median(k2_samp$etasq),
median(k2_samp$rhosq))
cor_mat <- cov2cor(cov_mat)
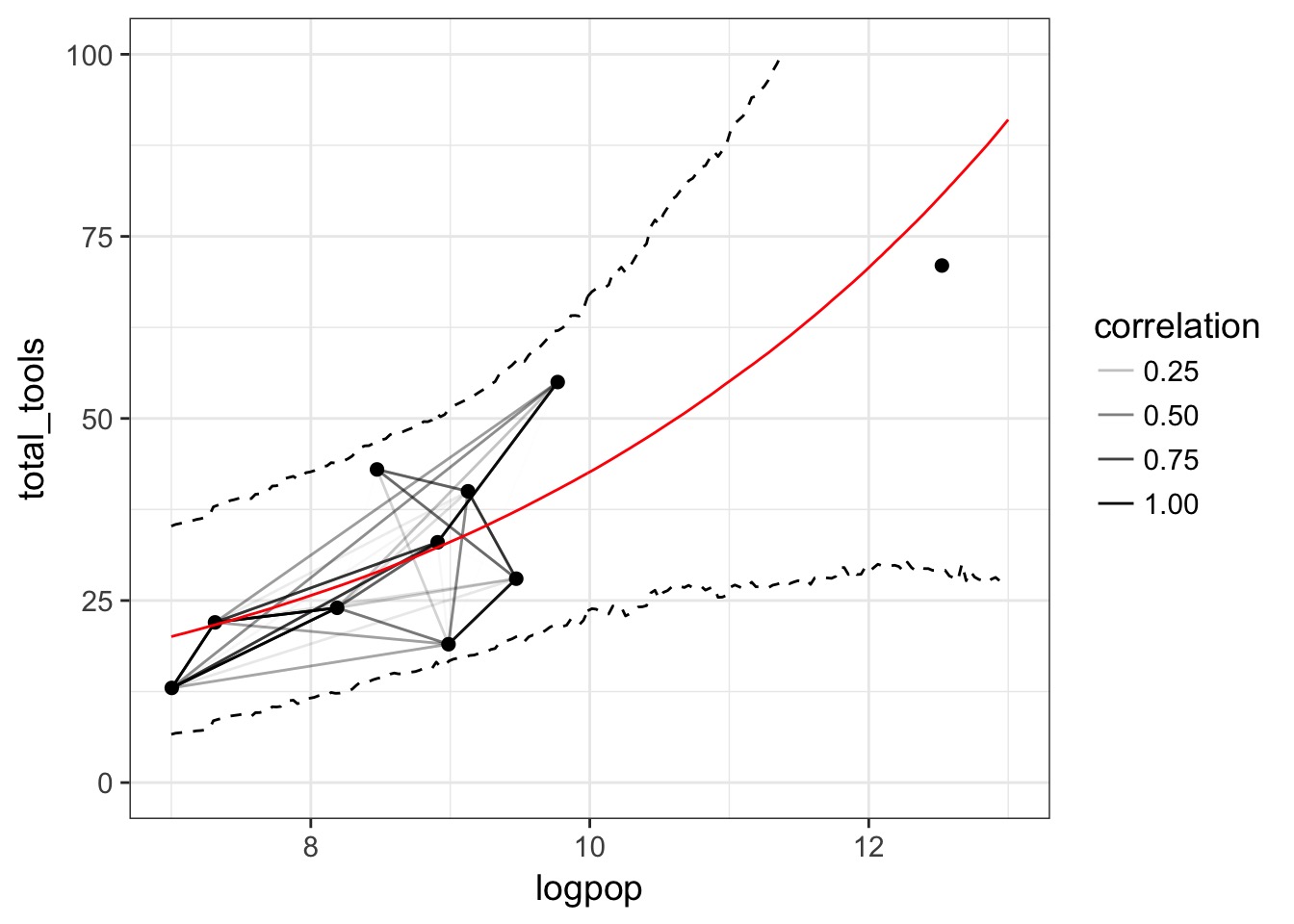
Putting it all together…
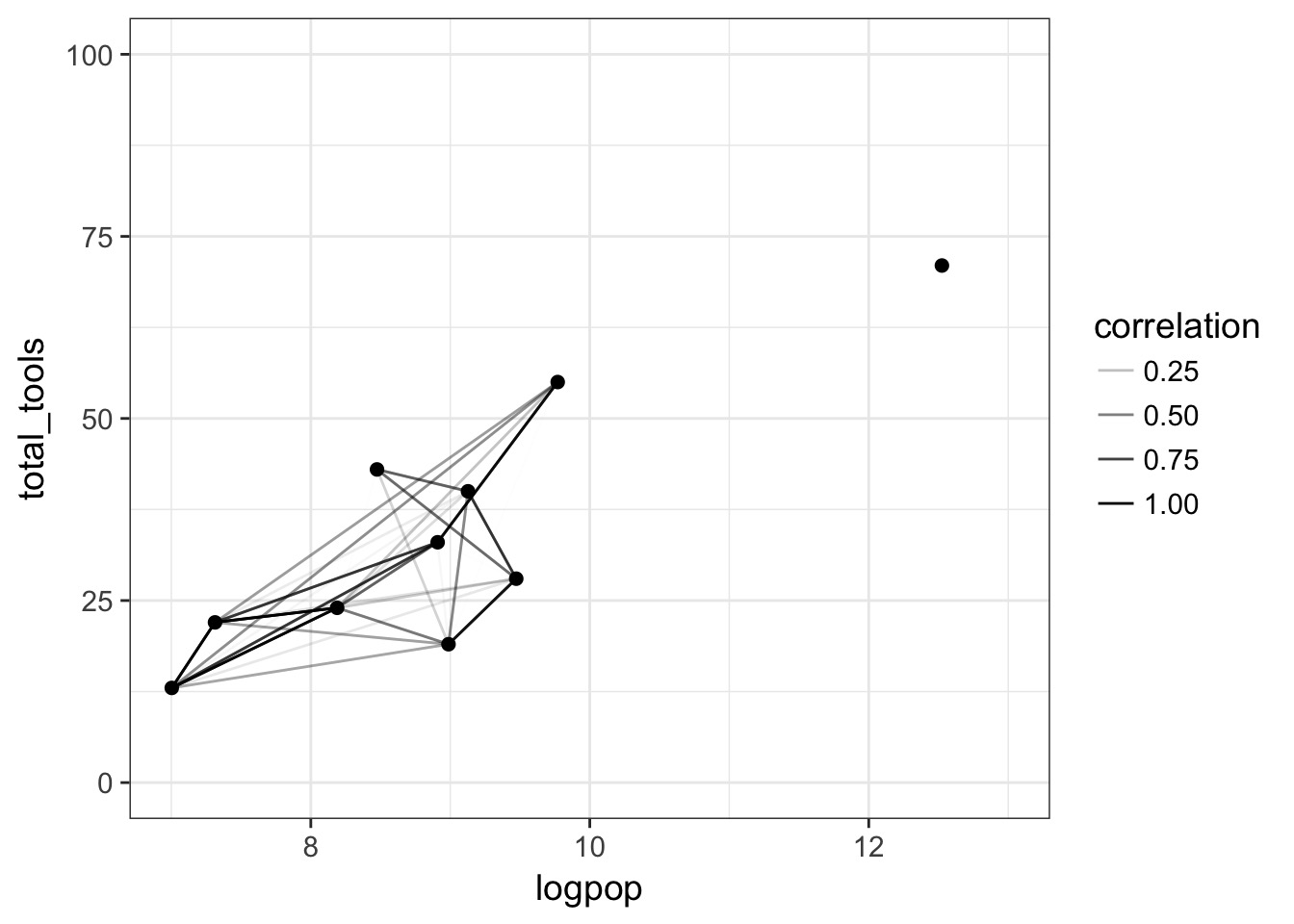
Putting it all together…
Outline
- Introduction Gaussian Processes
- Gaussian Processes for Spatial Autocorrelation
- Introduction Gaussian Processes for Timeseries
Kelp from spaaaace!!!
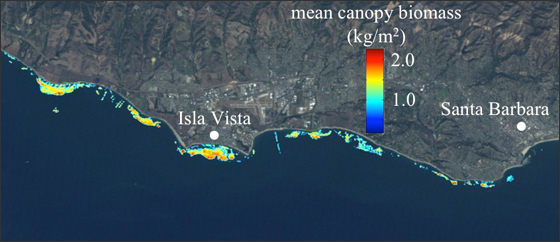
Cavanaugh et al. 2011, Bell et al. 2015, Rosenthal et al. THIS SUMMER
The Mohawk Transect 3 300m Timeseries

A Simple Gaussian Process Model
For time point i
Likelihood kelpi ~ Normal(\(\mu_i\), \(\sigma\))
Data Generating Process
\(\mu_i \sim \alpha_i\)
\(\alpha_i\) ~ MVnormal((0, …0), K)
\(K_{ij} = \eta^2 exp \left( -\rho^2 D_{ij}^2 \right) + \delta_{ij}(0.01)\)
## A Transformation and Complex models - Specifying efficient priors can be difficult
- Scaling data can help with reasonable prior specification
- Centering removes need for mean parameter (no \(\overline{a}\))
- E.g. z-transformed kelp, or predictors
- This isn’t bad as a general practice, as back-scaling is easy
ltrmk3_clean <- ltrmk3 %>%
mutate(kelp_s = (X300m-mean(X300m, na.rm=T))/sd(X300m, na.rm=T) ) %>%
filter(!is.na(kelp_s))
Kelp Model
kelp_mod_noyear <- alist(
kelp_s ~ dnorm(mu, sigma),
mu <- a[time_idx],
a[time_idx] ~ GPL2( Dmat , etasq , rhosq , delta_sq),
sigma ~ dcauchy(0,5),
etasq ~ dcauchy(0,2),
delta_sq ~ dcauchy(0,2),
rhosq ~ dcauchy(0,2)
)
Fitting
Need a time index and a distance matrix
#distance matrix, distance in seconds, so correct to days
kelp_dist_mat <- as.matrix(dist(ltrmk3_clean$Date))
kelp_dist_mat <- kelp_dist_mat/60/60/24
#fit!
kelp_fit_noyear <- map2stan(kelp_mod_noyear, data = list(
time_idx = 1:nrow(ltrmk3_clean),
kelp_s = ltrmk3_clean$kelp_s,
Dmat = kelp_dist_mat),
warmup=2000 , iter=1e4 , chains=3)
Are we good?
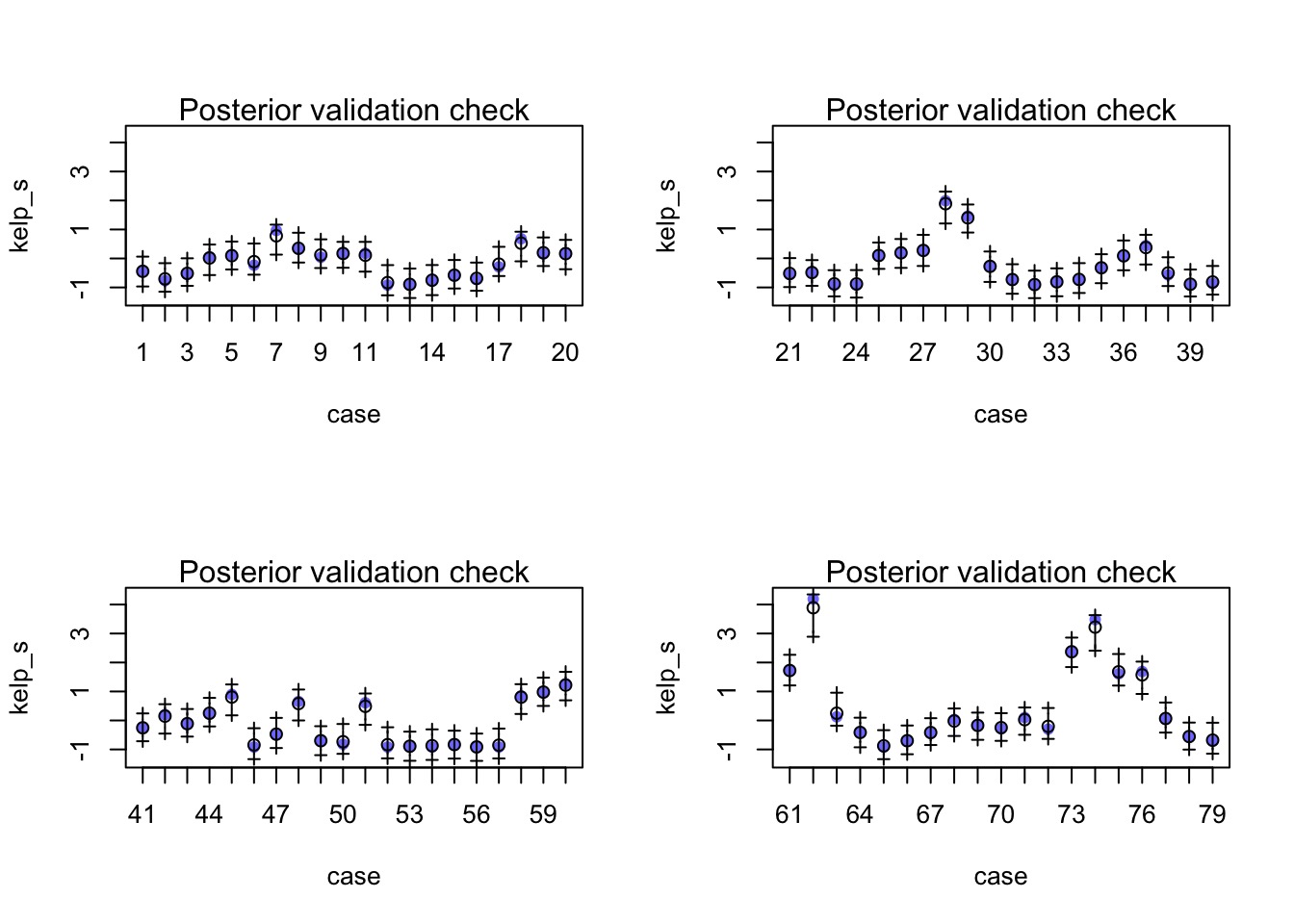
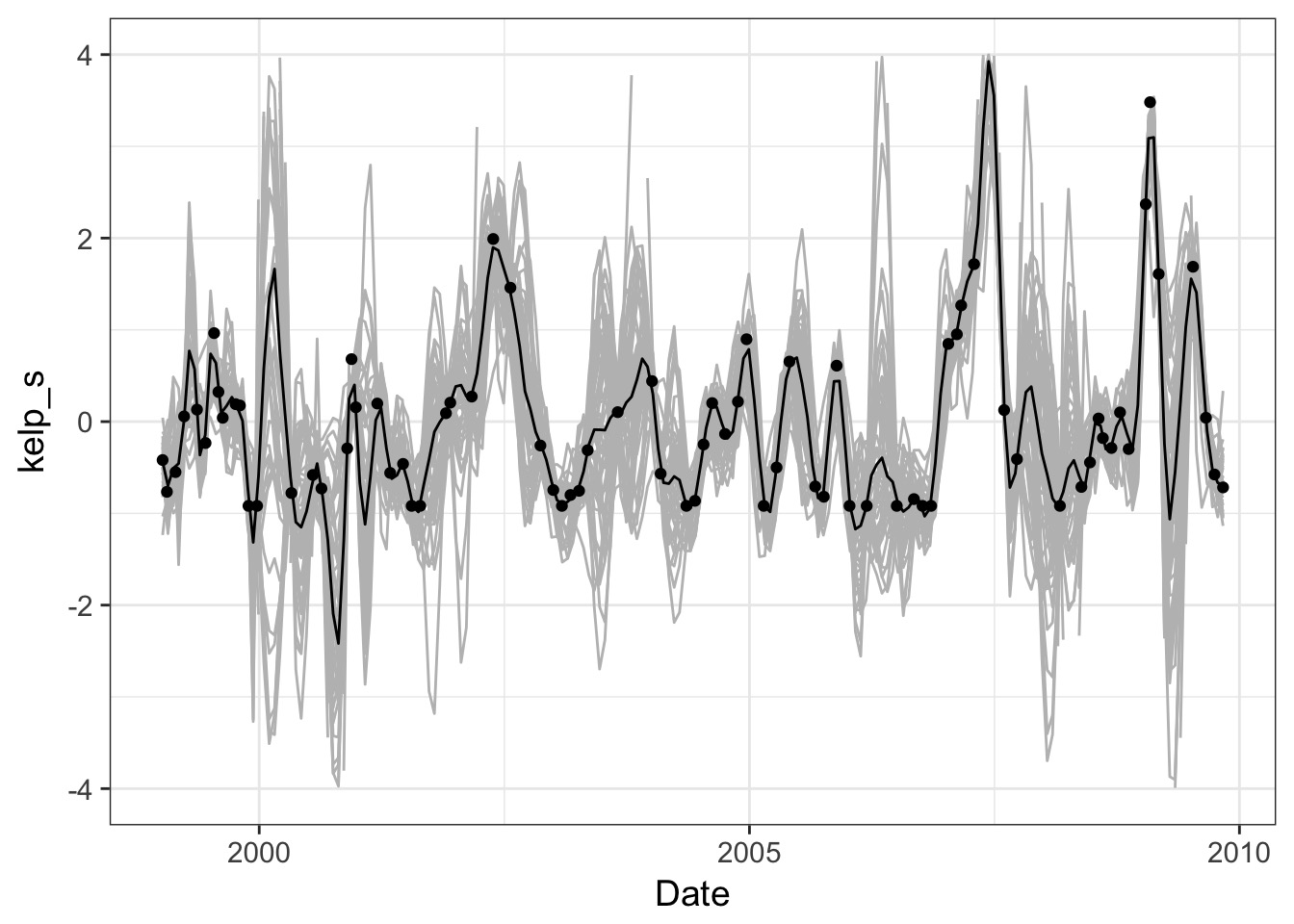
The Fit from Link
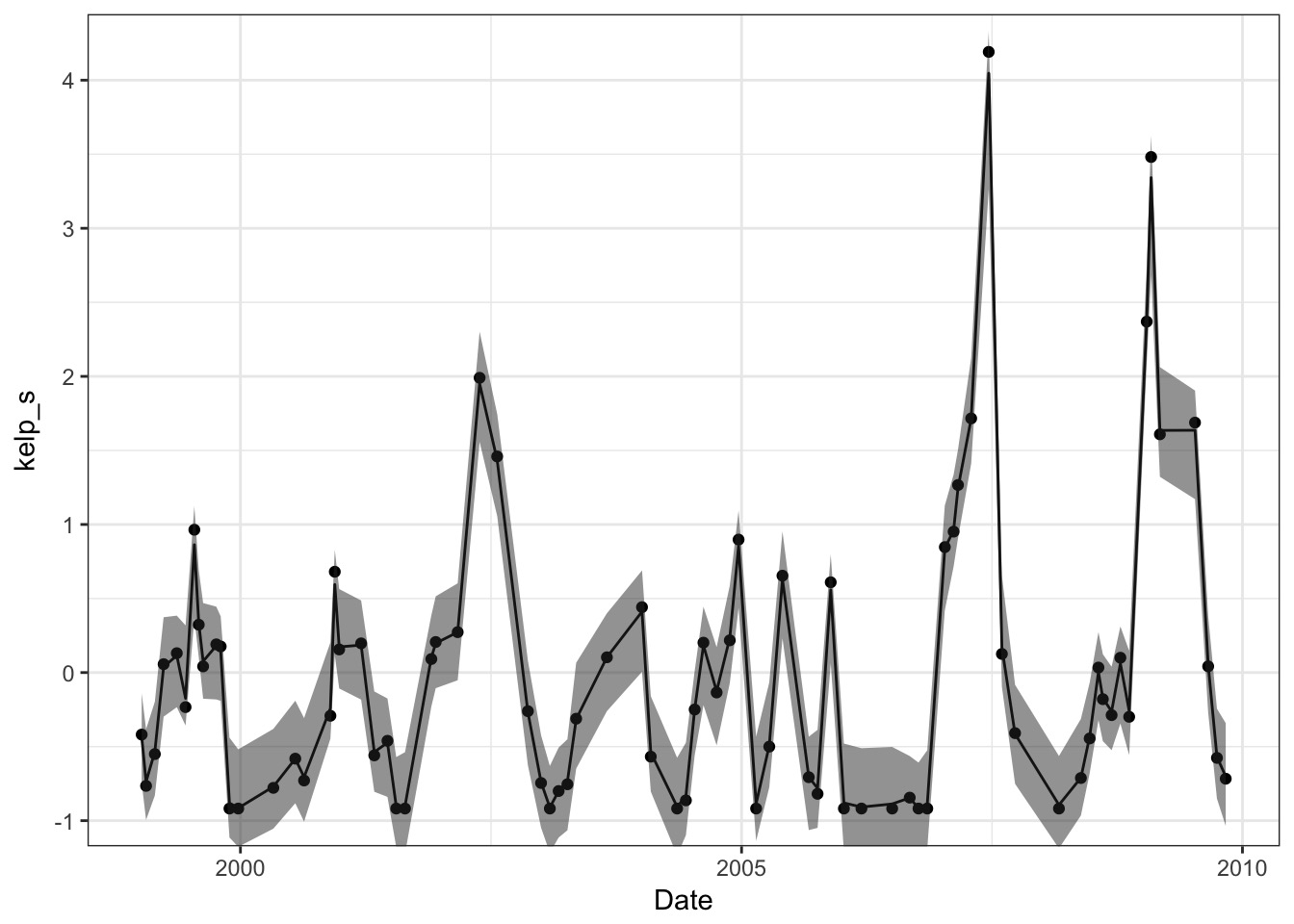 With an l = 58.4 days
With an l = 58.4 days
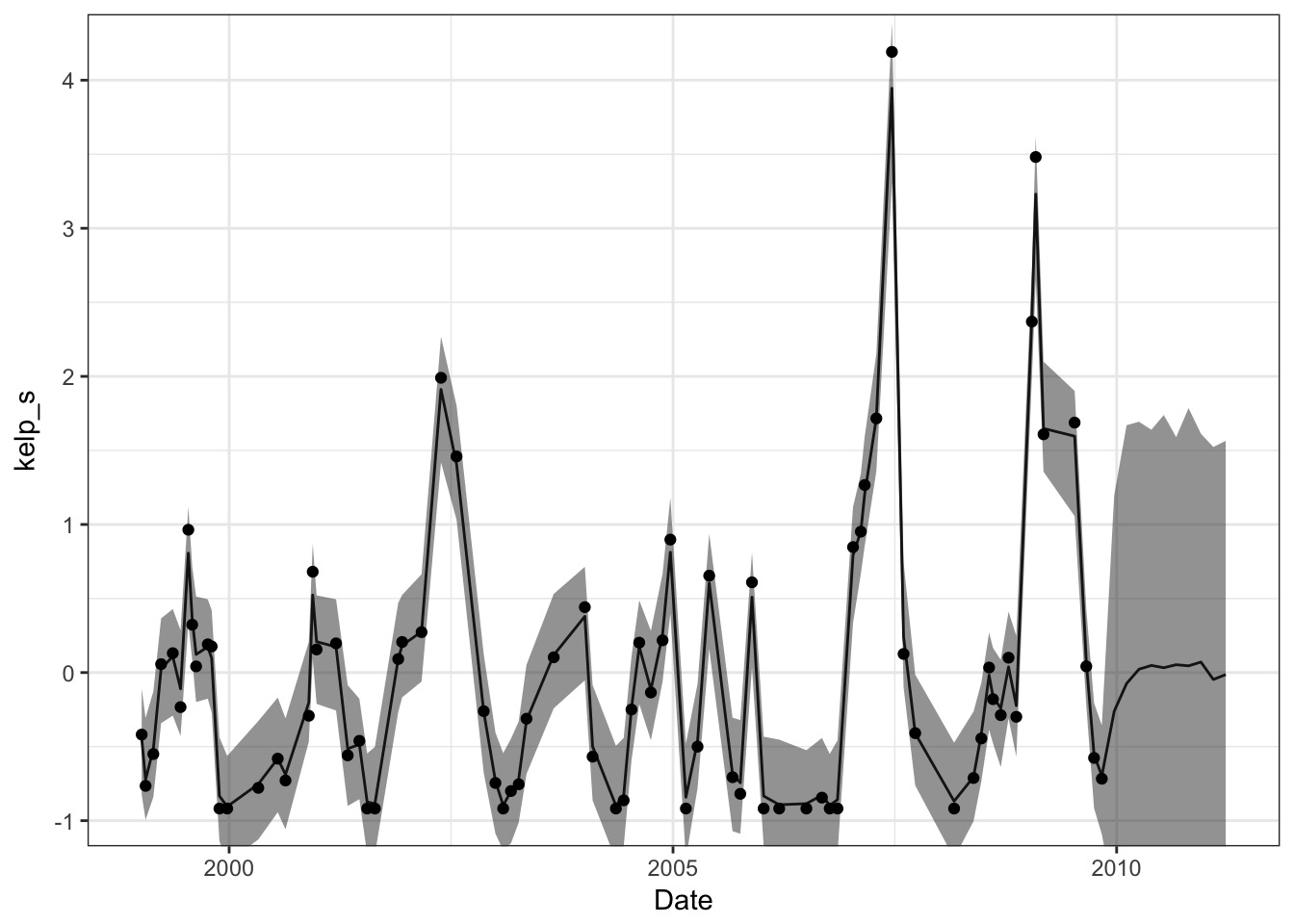
Two options for interpolation/prediction
- Refit the model with NA values to forecast predictions
- Gets at uncertainty within the model
- Missing data imputation
- Slow
- Recalculate covariance matrices given GP and use formulae
- Need to roll your own
- But I’ll give you a function…
- Creating predictions not automatic!
Data Imputation Approach
#new dates with 51 day intervals
date_delta <- round(mean(ltrmk3_clean$Date-lag(ltrmk3_clean$Date), na.rm=T))
new_dates <- c(ltrmk3_clean$Date, seq(1,10)*date_delta+max(ltrmk3_clean$Date))
#make a new distance matrix
kelp_dist_mat_for_pred <- as.matrix(dist(new_dates))/60/60/24
#the fit, with NA for values to impute
#and start values to tell rethinking
#how much data is there
kelp_fit_noyear_pred <- map2stan(kelp_mod_noyear, data = list(
time_idx = 1:length(new_dates),
kelp_s = c(ltrmk3_clean$kelp_s, rep(NA, 10)),
Dmat = kelp_dist_mat_for_pred),
warmup=2000 , iter=1e4 , chains=3,
start=list(a=rep(0, length(new_dates))))
Imputation
Or….
#new functions!
source("./data/gp/predict_gpl2.R")
#samples
kelp_samp <- extract.samples(kelp_fit_noyear)
#get a matrix of predictions for a
xold <- as.numeric(ltrmk3_clean$Date)/60/60/24
xnew <- as.numeric(new_dates)/60/60/24
new_a <- predict_gpl2_fromsamp(xold, xnew,
yold_mat = kelp_samp$a,
etasq = kelp_samp$etasq,
rhosq = kelp_samp$rhosq, n=50)
Plot those predictions!
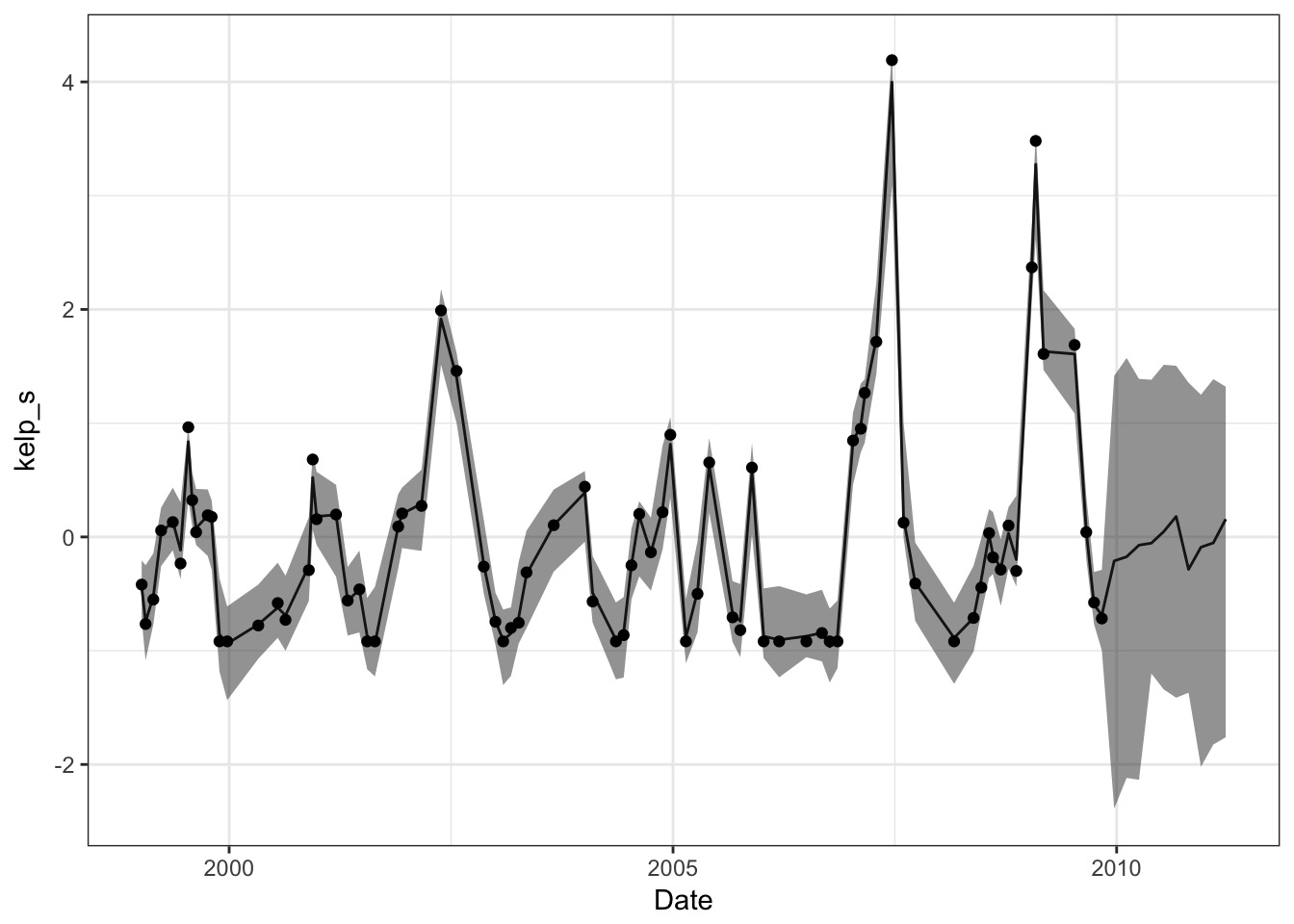
A Smooth Curve
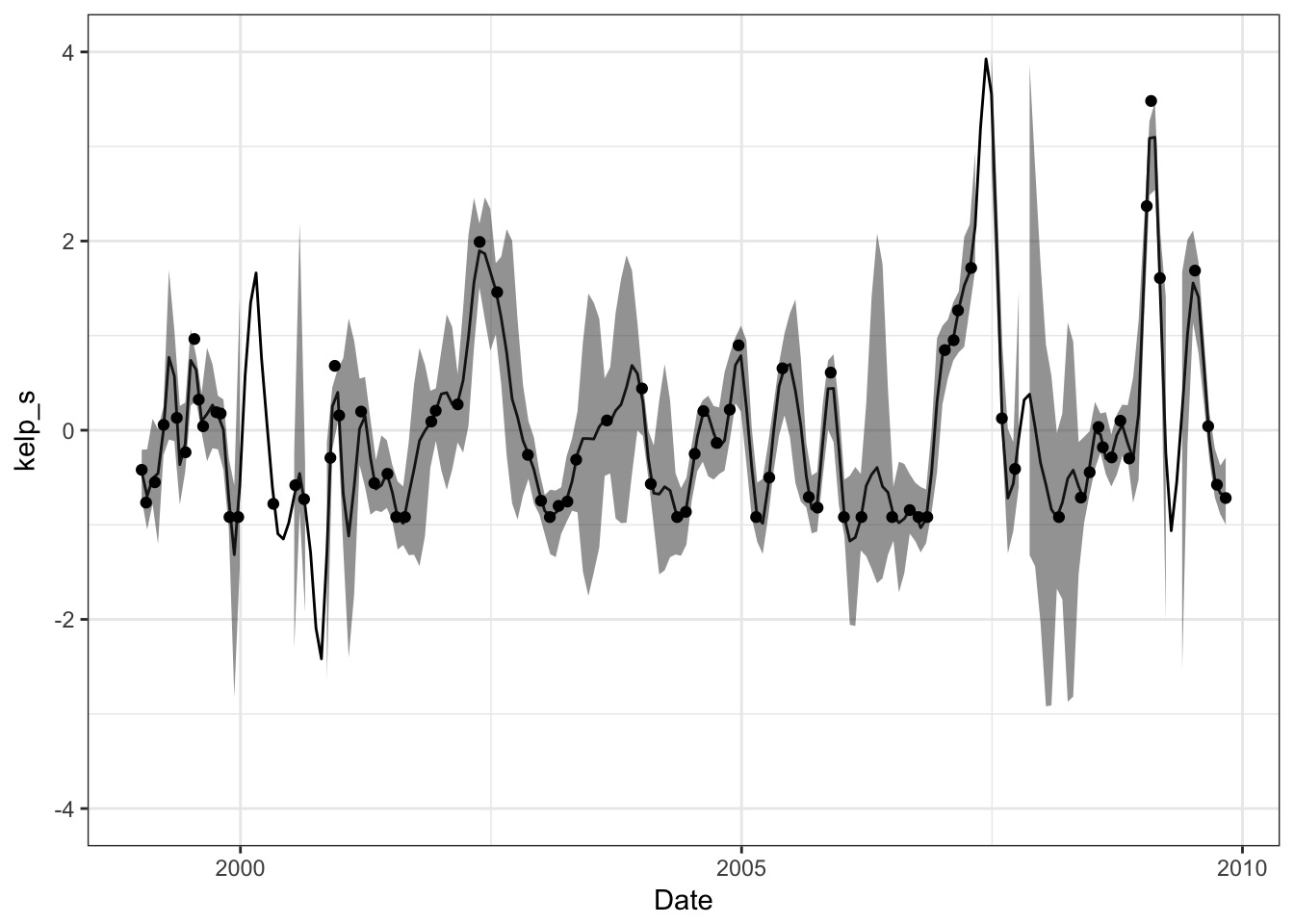
Or individual trajectories
Take Homes
- Gaussian Process allow incorporation of non-mechanistic processes
- Accomodates many forms of autocorrelation
- Powerful, flexible, new
- Can incporpoate multiple sources of GP variability
- E.g. annual, decadal, multi-decadal signals